

LLMs can make robots a lot smarter. They can be used to analyze what robots see and allow operators to control with natural language. With ROS MCP Server, you can connect your robots to Gemini, GPT, or Claude. It works with ROS1 and ROS2. You will be able to integrate any LLM that is MCP enabled. With this approach, LLMs can interpret images from the robot’s cameras and command them based on human language.
ROS MCP Server Demo with Unitree GO2 Robot
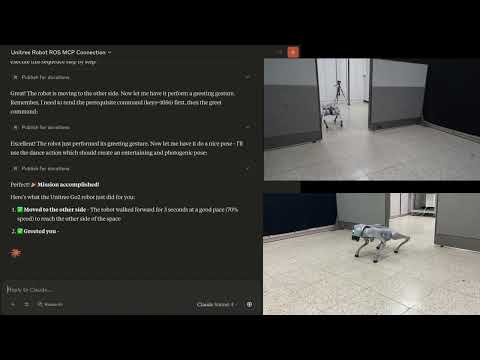
As the above video shows, ROS MCP Server can be used to interact with Unitree Go. It can also control a mobile manipulator in NVIDIA Isaac Sim. You can find out more here.